





云鲸智能是一款专为云鲸机器人用户设计的专属控制软件。用户可以远程操控云鲸扫拖一体机器人,随时随地查看机器人状态和清洁进展。支持多种清洁模式选择,包括扫地、拖地等,用户可根据不同使用场景制定专属清洁方案。
特色
1、不断添加设备,在原有的智能设备基础上可以不断的新增智能设备。
2、设备异常提醒,一旦设备发生问题则可以在此获得消息提醒。
3、实时管理设备,设备电量、运行状态以及连接情况等可以随时查看。
4、自动发现设备,利用蓝牙可以自动搜索以及快速匹配连接智能设备。
5、扫码快捷添加,除了手动添加方式之外扫描添加方式非常好用。
6、设备自由搭配,在全部智能设备之中可以选择多个设备进行关联。
亮点
自动识别清洗
搭配清洗基站,自动识别拖布脏污程度,自动返回基站进行清洗
多种智能算法
如建图算法、补扫算法、房间切割算法、最优化清洁路径算法等
APP轻松操控
制定个人专属清洁方案,随时随地远程操控机器人
快速更换模块
搭配扫拖两个模块,轻松拆卸,快速更换,扫拖更随心
优势
随时随地,手机app远程遥控
支持云分享,随时在线分享视频和照片
遥控模式,自定义清扫方向,随心所欲清扫
动态监控,让外出的您可以随时随地的查看家里的一切
可以通过软件在线储存查看机器人拍摄的视频画面
出门在外,能够通过软件和扫地机器人和家人进行实时的聊天问好,支持语音和视频
怎么自定义清洁计划?
1、在本站下载后打开进入应用,点击计划管理,进入自动清洁计划界面;

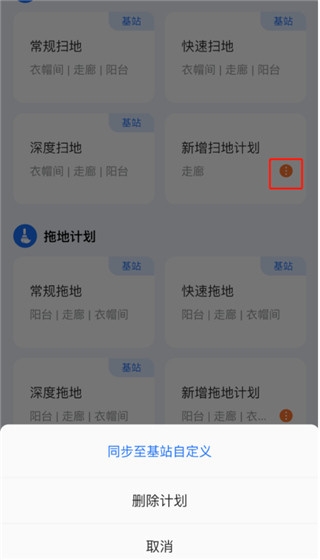
2、清洁计划分为扫地和拖地计划,用户可对原有的计划进行编辑或删除,也可以点击新建清洁计划;

3、在地图上选中需要清洁的房间,机器人就会根据所选房间,自动生成最优的清洁顺序;

4、另外在拖地计划中还可设置选中房间的拖地干湿度;

5、最后点击编辑,选择同步至基站自定义,就可把现有的计划同步至基站。
云鲸智能怎么连接扫拖机器人设备
1、打开云鲸智能,来到用户首页,点击页面上方的“加号”选项;

2、来到选择设备页面,选择你的设备型号;

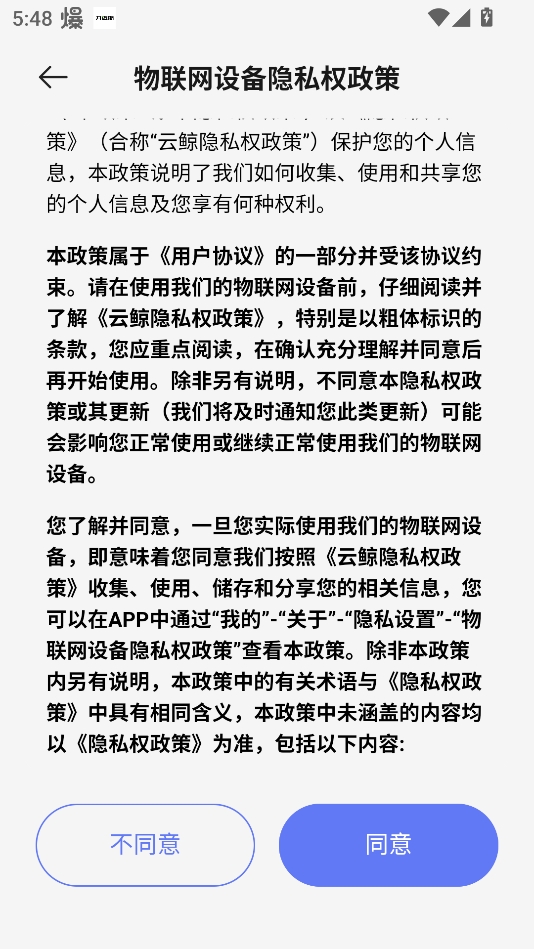
3、在弹出的物联网设备隐私页面中点击“同意”按钮;
4、开启定位服务以及蓝牙,点击立即开启按钮;

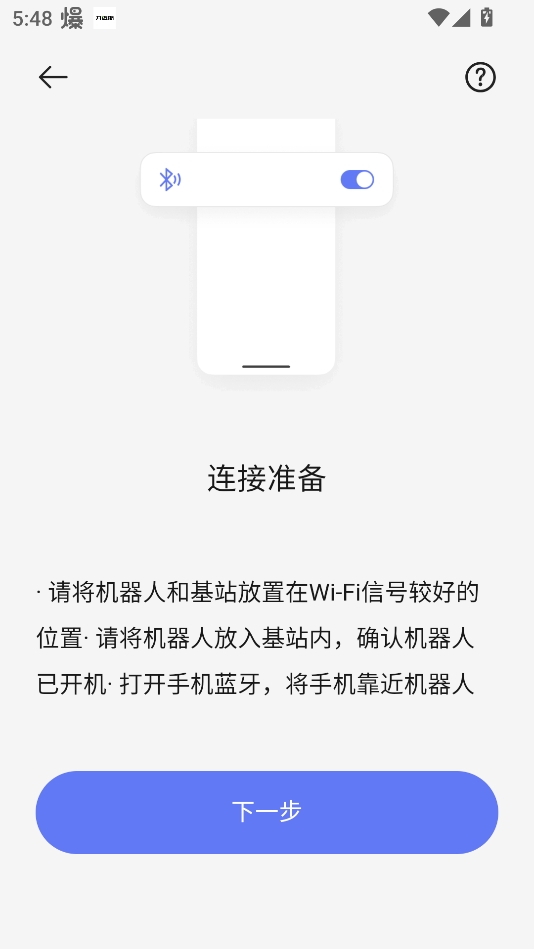
5、将机器人放在wifi信号较好的位置,确认机器人已开机,将手机靠近机器人,点击下一步按钮,依次根据页面提示操作即可连接;
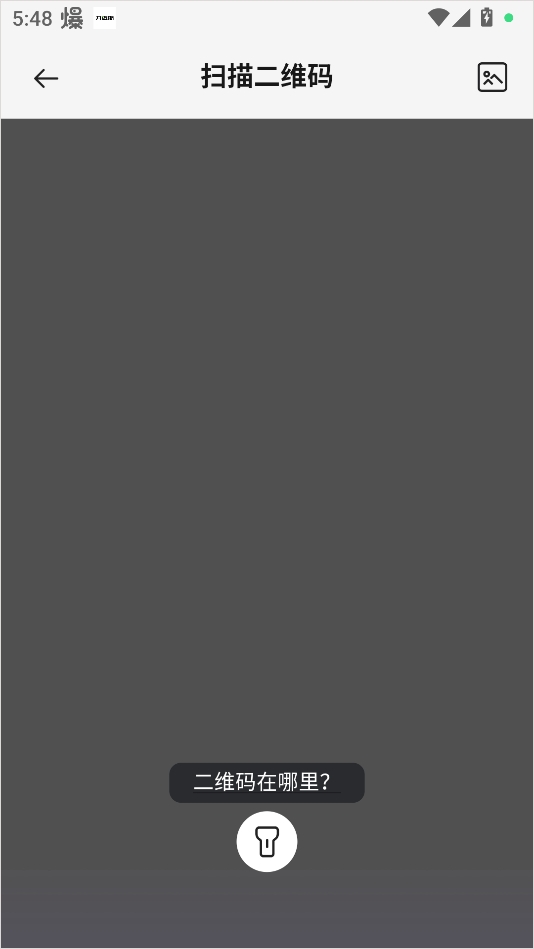
6、还可以直接扫码设备上方的二维码进行连接。
更新日志
v2.6.42
- 修复了一些已知问题,优化用户使用体验。
v2.6.8
修复了一些BUG。
v2.6.4
- 时间线交互ui升级,清洁动态更加清晰明了;
- 修复了一些已知问题,优化用户使用体验。



















访问网络
访问网络连接,可能产生GPRS流量
-------------------------------------
获取网络状态
获取网络信息状态,如当前的网络连接是否有效
-------------------------------------
获取WiFi状态
获取当前WiFi接入的状态以及WLAN热点的信息
-------------------------------------
拍照权限
允许访问摄像头进行拍照
-------------------------------------
唤醒锁定
允许程序在手机屏幕关闭后后台进程仍然运行
-------------------------------------
改变WiFi状态
改变WiFi状态
-------------------------------------
改变WiFi多播状态
改变WiFi多播状态
-------------------------------------
显示系统窗口
显示系统窗口
-------------------------------------
访问外部存储
访问外部存储的权限
-------------------------------------
写入外部存储
允许程序写入外部存储,如SD卡上写文件
-------------------------------------
获取精确位置
通过GPS芯片接收卫星的定位信息,定位精度达10米以内
-------------------------------------
改变网络状态
改变网络状态如是否能联网
-------------------------------------
读取电话状态
访问电话状态
-------------------------------------
读写系统设置
允许读写系统设置项
-------------------------------------
挂载文件系统
挂载、反挂载外部文件系统
-------------------------------------
使用振动
允许振动
-------------------------------------
获取粗略位置
通过WiFi或移动基站的方式获取用户错略的经纬度信息,定位精度大概误差在30~1500米
-------------------------------------
访问定位额外命令
允许程序访问额外的定位提供者指令
-------------------------------------
获取任务信息
允许程序获取当前或最近运行的应用
-------------------------------------